Analysis Of Wave Height To Ship Motion With Displacement Of 7,597 Tons By Finite Element Method
Article Sidebar
Main Article Content
Abstract
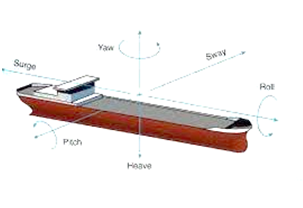
Seakeeping is the ship's ability to stay afloat on the waves. The ship's maneuverability is greatly influenced by external factors related to the state of the sea and the waters in which the ship sails. Calculating seakeeping with various variations of depth, current, and wave height is needed for ship safety when sailing in the calculation of seakeeping using linear strip theory to calculate the response of heaving and pitching movements while roll damping theory for rolling movements. In this study, the ship's motion is calculated using the Finite element method software Hydrodynamic Diffraction and Hydrodynamic Time Response. For variations in wave height and water depth, referring to the conditions of Indonesian waters, from the reference, variations in wave height of 3 m, and 5 m (based on sea state WMO). In contrast, the current variation uses a current with a speed of 10 knots and a current depth of 10 T, 15 T, and 20 T. Based on the data obtained in data processing, it can be seen that the high value of the wave frequency obtained at 90 and 270 degrees wave direction is relatively high. The value of the roll spectrum in the direction of 0 and 270 degrees is large and can cause rolling on the ship. In the direction of 0 and 270 degrees, the wave resistance can be reduced by the ship.
Downloads
Article Details

This work is licensed under a Creative Commons Attribution 4.0 International License.
References
Parlindungan, M. 2012. “Analysis of Ship Seakeeping Movements on Regular Waves”
Arifin, M.T. 2014. “Review of Seakeeping Aspects in Ship Planning”
H. Palippui, “Analysis Of The Installation Of Subsea Pipelines To Support The Need For Clean Water In Supporting Tourism Development On Kayangan Island”, MaritimePark, vol. 1, no. 1,
Bhattacharyya, R. 1972. Dynamic of Marine Vehicles. New York, United States of America.
Robert, F.B, (1988), Motion In Waves and Controllability, Principles of Naval Architecture Volume III, The Society of Naval Architects and Marine Engineers, USA.
Pratama, R. (2015), Ship Motion. [On line]. Available: ttp://pipmakassar32.blogspot.co.id/2015 /09/olah-gerak.html [ 20 December 2016].
N. (1987), “NORDFORSK (1987) -Seakeeping Criteria,” p. 1987, 1987.